
Cuidado que esta es la visión es de alguien que no viene del palo de la electrónica.
Me refiero a los lazos de control PIDs
Es una electrónica, que se encarga de controlar un proceso, aplicando unas funciones, que son retroalimentadas por unas variables obtenidas por sensores.
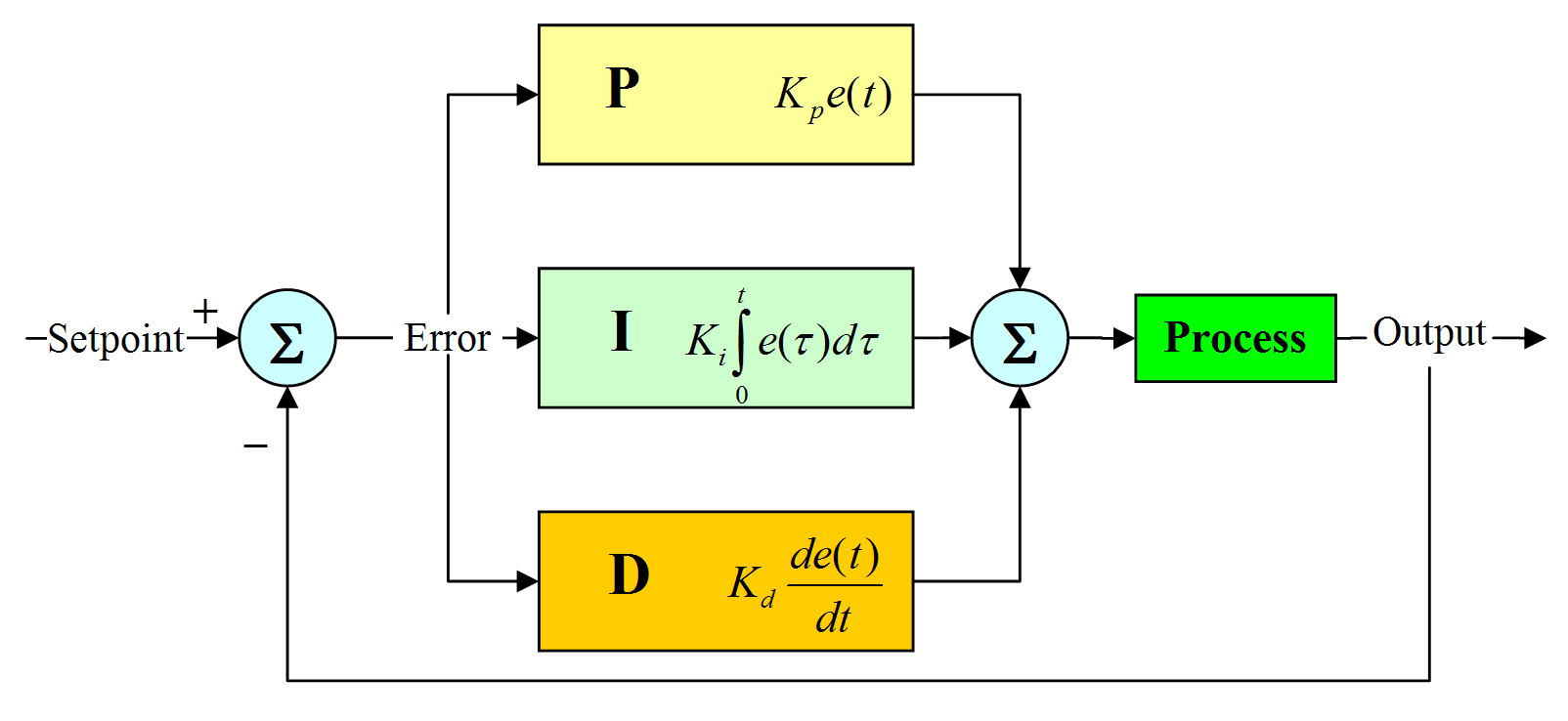
El diagrama es el siguiente
Si lo analizamos con un ejemplo, creo que se entiende más facilmente.
El setpoint, es el valor que quiero llegar.
En una cañería, puede ser un determinado caudal, pero en un drone es la estabilidad (flotar).
Ahora, el viento lo mueve y el acelerómetro y giroscopio, acusan valores distintos de cero, por lo tanto, si mi setpoint era cero movimiento, estos sensores me estan indicando directamente el error.
Por ejemplo, 1 en X 1.2 en y -0.3 en z.
Entonces aquí entra en juego el lazo de control PID (Proporcional, Integral y Derivativo) para corregir ese error, haciendo un bucle en cada corrección.
En palabras:
La corrección proporcional (P) es la que envía una señal a los motores para que aceleren la masa del drone y generen un desplazamiento -1x, -1.2y 0.3z
Lo más probable, es que tenga que volver a corregir la nueva situación, generada por la corrección anterior, es por ello que entra en juego la segunda parte del controlador, que se suma a la anterior y es la parte integral (I) que integra los errores para ir sumandolos y agregarlos a la señal de control, o sea que analiza y pondera los errores pasados.
Pero acá no termina la correción. Hay un tercer término que es el derivativo (D), que se encarga de calcular la derivada de los errores (calcular su pendiente de cambio) y estimar como van a continuar el error. Como ejemplo, recordar que la derivada de la velocidad, es la aceleración, la cual mide el ritmo de cambio del vector velocidad. Por eso le dicen que ve el error futuro.
Resumindo:
Es una proceso de corrección de un error, que tiene tres funciones ponderadas por medio de 3 constantes Kp, Ki y Kd, a las cuales nosotros le damos la participación en la suma de correcciones.
El aporte de cada uno, genera la intensidad de motores más acertada, para que rápidamente se estabilice el sistema (drone).
En este video se puede ver bien como trabaja un controlador PID.
La Bitácora de Vuelo
Historias de Vuelo
No hay comentarios:
Publicar un comentario